雷达演讲资料收集
参考
https://www.bilibili.com/video/BV1QU4y1B7i4/
https://zhuanlan.zhihu.com/p/139350599
https://zhuanlan.zhihu.com/p/346374177
https://zhuanlan.zhihu.com/p/92887546
https://www.bilibili.com/video/BV1114y1J76r
https://www.bilibili.com/video/BV14M4y1f7eK
技术介绍:对雷达、激光、毫米波、3D、4D等新技术进行简要介绍,包括原理、特点、优劣势等方面的内容。
应用场景:介绍无人驾驶技术在不同应用场景下的应用情况,如城市交通、物流配送、农业、工业等领域,以及不同类型的车辆(地面车辆、航空器、水上船只等)。
产业现状:介绍无人驾驶技术相关的产业现状和趋势,包括全球市场规模、主要参与者、政策法规等方面的内容。
自动驾驶
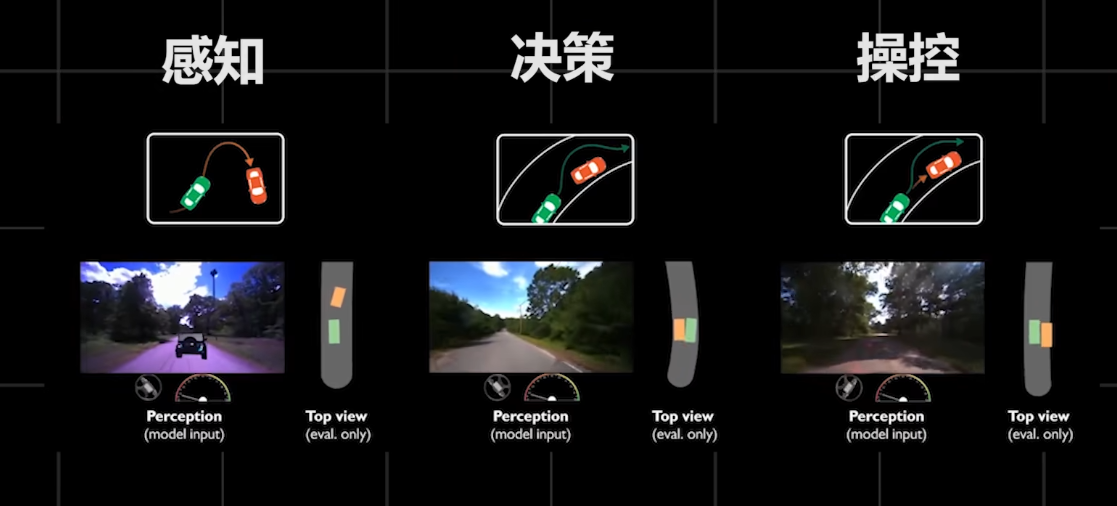
自动驾驶和人类一样也分为感知、决策、操控三个方面
感知硬件
为什么要用雷达
在视觉为主的辅助驾驶市场,为什么要用雷达,因为视觉就如同我们的人眼,人眼有的缺点它当然也有,比如进出隧道,乌漆嘛黑的小巷,明暗交替剧烈的环境,摄像头和人眼一样容易跟丢目标.

激光雷达
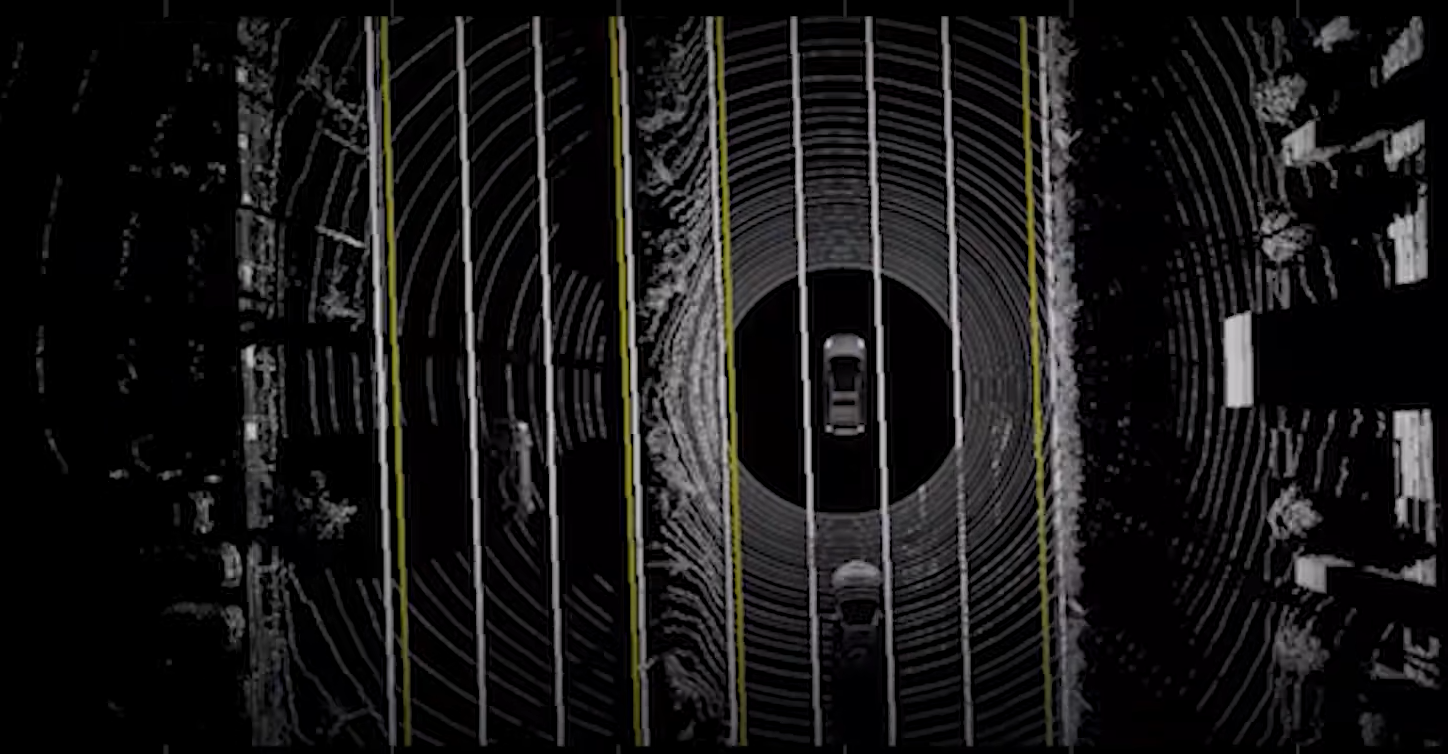
通过每秒上百万次的激光脉冲对外界进行旋转扫描,获取周边物理的精确三维数据,提高系统对周边环境的识别准确度。
一般150米以上
实现方法:
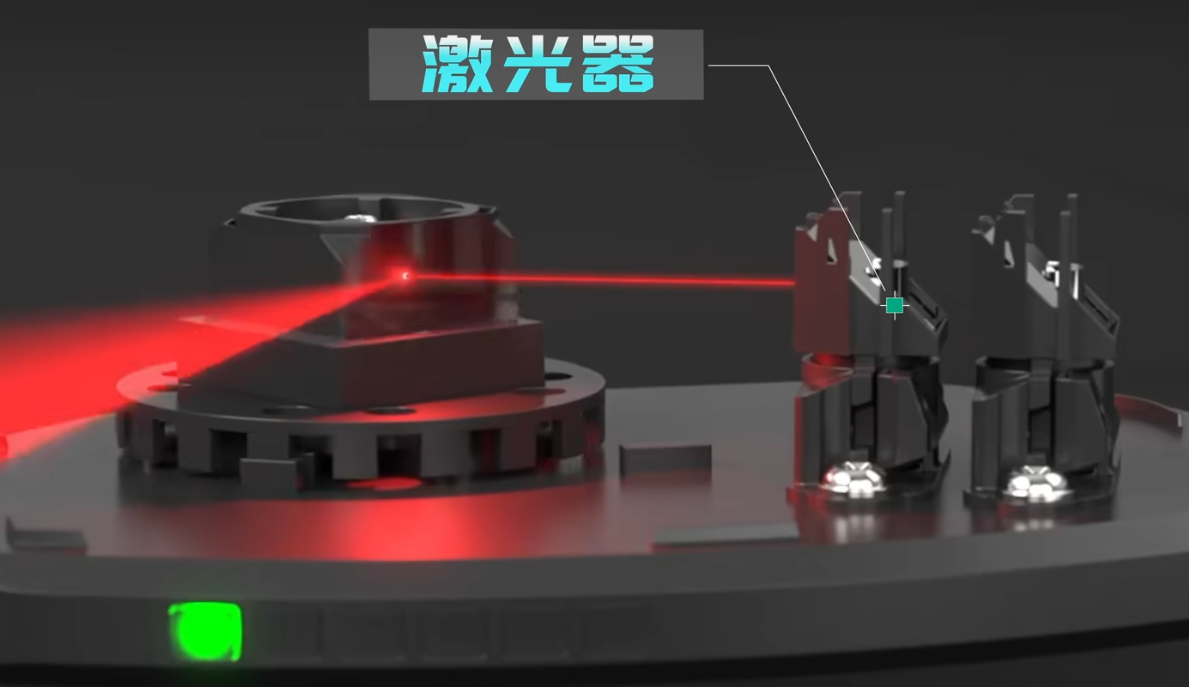
机械式激光雷达——依靠旋转
问题:需要不断累积,体积大、寿命短、价格高
解决办法:半固态激光雷达,激光器是固定的,而转镜或者叫振镜在旋转
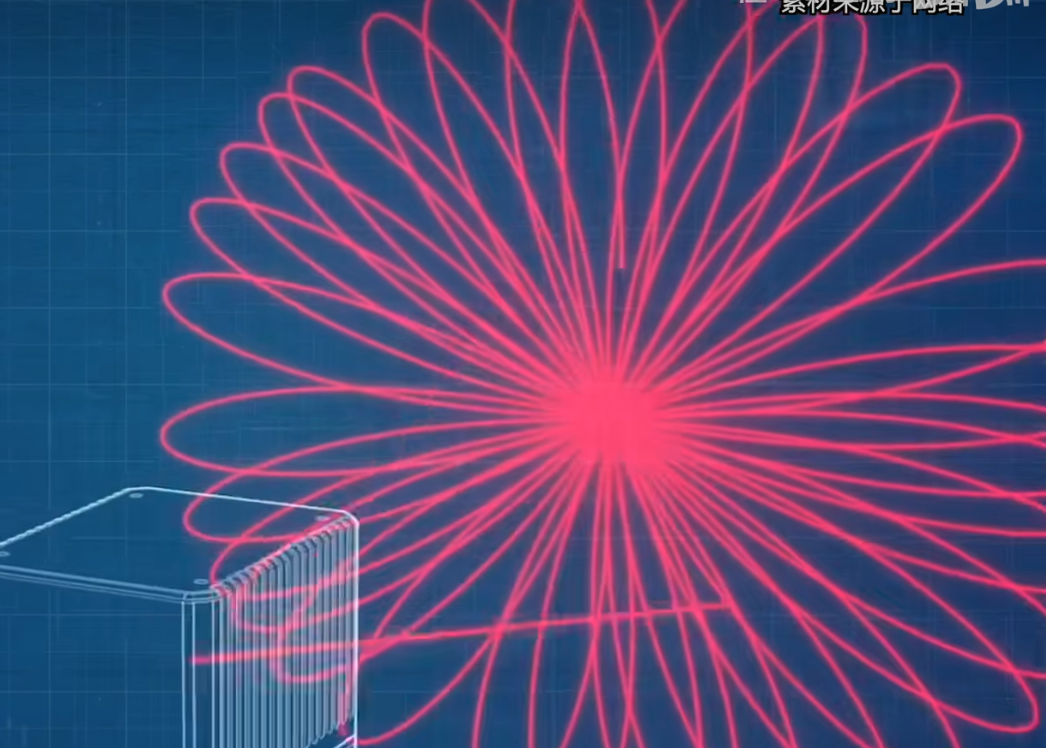
上面的是一维转镜,显然这样子仍然需要叠加多个激光发射器,所以车企还研发了更多不同的形式雷达:
- 通过振镜的高频振动来反射激光:


- 大疆览沃HAP激光雷达:是楔形的振镜
毫米波雷达
它就是一个用毫米级的电磁波的发射与接收,很多时候也叫3D技术毫米波雷达,3D是测量出的是距离 方位 速度三个数据.仔细想想可以知道这个是个二维平面,那么问题是什么呢?极端来说,地上一根减速带和一堵墙在它看来是一样的;一个易拉罐和一根柱子是一样的.所以大部分毫米波雷达干脆都把静态物体当作杂波过滤掉了
4D成象量米波雷达,信道更多
高清雷达是一种FMCW调频连续波雷达,借助多普勒效应来获得信息
特点
- 和 LiDAR 相比
Radar 和 Lidar 的之争是话题热点,但实际上,这些传感器是互补的。昂贵的激光雷达能够利用目标对激光的反射产生高分辨率成像,能够提供精确的形状和位置信息,但是在恶劣的天气条件下无法工作。
雷达不具备产生高分辨率图像的能力,但是它具有基于多普勒现象的高精度速度估计。此外,雷达波长允许它在恶劣的天气条件下感知目标,最重要的是制造成本低。
- 优势
- 体积小,安装之后对汽车外观的影响不大;
- 纵向目标探测距离与速度探测能力强;
- 对于静态和动态目标均能作出高精度测量;
- 全天候、全天时工作,不论昼夜,穿透能力强,不受天气状况限制。
- 劣势
- 无法成像,无法进行图像颜色识别;
- 行人反射波较弱,对行人分辨率不高;
- 探测距离近,垂直角度受限,对高处物体以及小物体检测效果不佳;
- 距离多普勒耦合以及收发隔离难;
- 在有体积要求的毫米波雷达上,垂直与水平方向天线紧密排布会相互产生严重的信号干扰;
- 信号处理算法的可靠性、实时性需要保证,传统的毫米波雷达ECU可能无法胜任大规模点云的处理。
- 数据存储需求将会加大,需要额外添置存储单元。
扩展
iPhone激光雷达

无人驾驶项目
- 谷歌公司的GoogleX实验室研发的
PPT制作
无人驾驶介绍
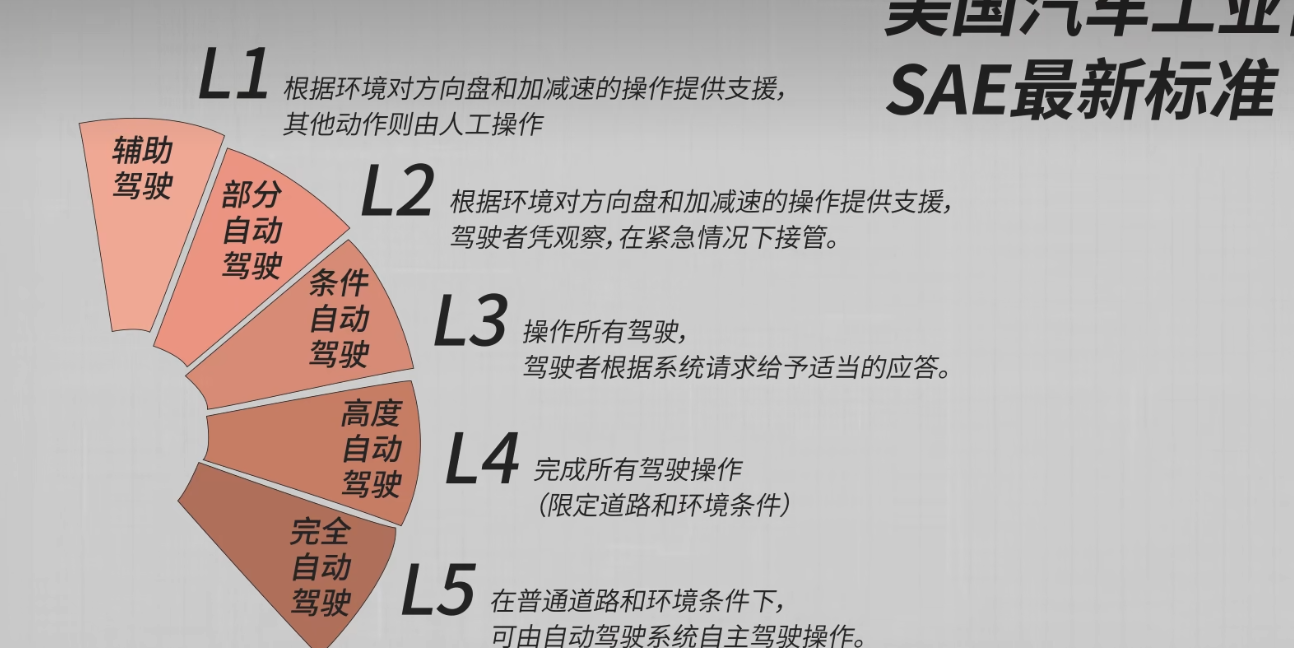
首先从行业标准来简单介绍一下无人驾驶是个啥,由低到高分为L1到L5,L1、L2只是辅助驾驶,到了L3系统就已经有能力操作所有驾驶行为了,L5就是完全的自主驾驶。
ok,回到无人驾驶技术的实现,我们可以简化分为三个部分:感知、决策、操控,这个很好理解,和我们人一样,要先看到信息,用大脑处理信息作出决策,发出信息超控身体运动。今天咱们的主题是雷达,那么我们就主要讲讲感知这一部分的内容。
最开始,对于无人驾驶技术,车企们主要还是利用视觉配合算法来实现,而雷达就用一个超声波雷达用来倒车,所以它也叫泊车雷达。但是到现在,雷达开始有了更多的应用。
在视觉为主的辅助驾驶市场,为什么要用雷达,因为视觉就如同我们的人眼,人眼有的缺点它当然也有,比如:乌漆嘛黑的小巷、进出高速隧道,这种明暗交替剧烈的环境,摄像头和人眼一样容易跟丢目标。
除此之外,还有一点我没有在ppt上写出来就是算力问题,对处理视觉图片往往需要大量即时的计算,毕竟谁也不希望自己的车里塞一张4090显卡吧,所以还更准确的信息作为辅助。
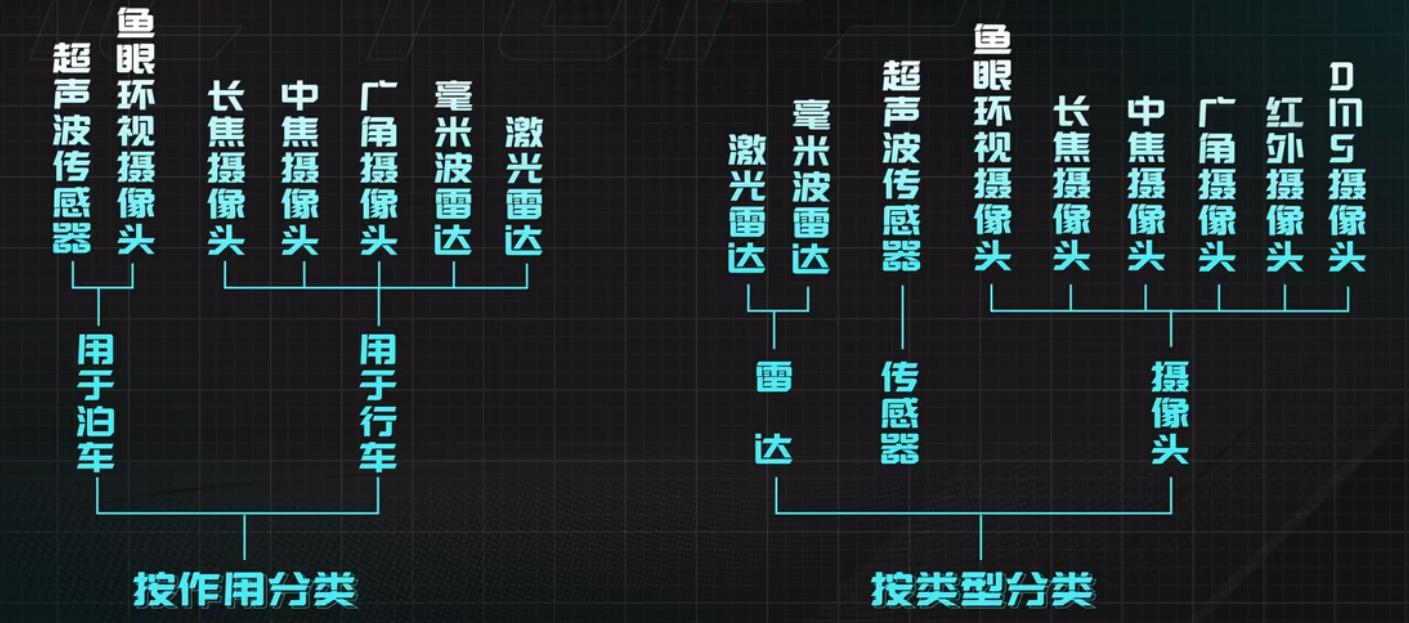
下面让我们来简单介绍一下传统车载雷达。
传统雷达种类与介绍
最新应用的雷达
现在与未来
从2020年起智能车行业迎来了新的风潮,各大新型车企成立,无人驾驶也在这一年来到了一个巨大的风口。除了巨大的资本涌入市场,还有疫情的影响,各种无人技术得到重视。美国加州出台首个自动驾驶出租车收费政策,Google等巨头投资的Argo AI也在这年成立,华为极狐落地测试,小鹏激光雷达上车,各种各样的公司开始冲击L4级别的自动驾驶。一切看起来都很美好,但是在2022年末,这场热闹戛然而止,Argo AI直接破产、小鹏大面积裁员、华为、小米等新型势力没有了声音。为什么呢
因为方向错了,而这个方向不是在技术上,而是在商业上。总的来说,车企们都很急,大家都疯狂地往L4、L5卷,对现实有美好的幻想,但是实际上还有太多难以解决的长尾难题。对于L4目前大部分的自动驾驶车只能局限于限定区域内行驶,车内还要安排安全员。这么多年,所有车企只能在小范围内测试,技术、产品、政策根本无法支持大范围地落地,所以一直不能达到商业上的闭环,为了得到足够的里程数,企业还是只能不断砸钱养车队、运营等反哺技术。但实际任然不理想,主要是目前只能在高速和限定区域内完成测试,对于实际情况的复杂路况还是太简单了。城市的道路标记、信号灯不统一、不文明驾驶等等问题都难以解决。对于这种回报周期很长的项目,资本显然是没有这么多的耐心,也就没有了持续投入的动力。
回到现实,目前实际运营的L4自动驾驶车企有不少转了方向,转向做更好落地的L2+级别的辅助驾驶。欸,知道L2、L4,L2+是什么,高情商的说就是接近L3的标准但是在L2的定位, 除了一些些营销手段意外,还有就是说反正不是L3,出了事情的主要责任还是车主。
